Atlanta, GA
zhouziyi@gatech.edu
I’m a Ph.D. student in the School of ECE , Georgia Tech , specializing in Robotics. I’m advised by Ye Zhao at the LIDAR lab.
Prior to that, I received an M.S. in ECE from Georgia Tech in 2020 and a B.Eng. in Automation from Northeastern University in 2018.
Living in a remarkable era of robotics, I’m passionate about full-stack planning, control, and estimation for contact-rich manipulation and legged locomotion, especially:
Distributed trajectory optimization and model predictive control Agile locomotion leveraging whole-body dynamics Safety-guaranteed footstep planning in challenging terrains IL/RL for contact-rich loco-manipulation I was fortunate to intern at MERL , UBTECH , and AlphaZ . I also collaborated closely with SkyMul during 2022 - 2023 to automate the rebar tying process using quadrupedal robots. Check out some of the work we showcased at WOC!
Email is the best way to reach me.
Full list on Google Scholar .
ACLM: ADMM-Based Distributed Model Predictive Control for Collaborative Loco-Manipulation
Ziyi Zhou* , Pengyuan Shu* , Ruize Cao* , and 2 more authors
In arXiv preprint , 2026
SEEC: Stable End-Effector Control with Model-Enhanced Residual Learning for Humanoid Loco-Manipulation
Jaehwi Jang* , Zhuoheng Wang* , Ziyi Zhou , and 2 more authors
In IEEE International Conference on Robotics and Automation (ICRA) , 2026
Physically-Feasible Reactive Synthesis for Terrain-Adaptive Locomotion
Ziyi Zhou , Qian Meng, Hadas Kress-Gazit, and 1 more author
In arXiv preprint , 2025
Opt2Skill: Imitating Dynamically-feasible Whole-Body Trajectories for Versatile Humanoid Loco-Manipulation
Fukang Liu, Zhaoyuan Gu, Yilin Cai, and 7 more authors
IEEE Robotics and Automation Letters (RA-L) , 2025
Physically-Feasible Reactive Synthesis for Terrain-Adaptive Locomotion via Trajectory Optimization and Symbolic Repair
Ziyi Zhou* , Qian Meng* , Hadas Kress-Gazit, and 1 more author
In IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) , 2025
Simultaneous Collision Detection and Force Estimation for Dynamic Quadrupedal Locomotion
Ziyi Zhou , Stefano Di Cairano, Yebin Wang, and 1 more author
In IEEE International Conference on Robotics and Automation (ICRA) , 2025
Real-Time Deformable-Contact-Aware Model Predictive Control for Force-Modulated Manipulation
Lasitha Wijayarathne* , Ziyi Zhou* , Ye Zhao, and 1 more author
IEEE Transactions on Robotics (TRO) , 2023
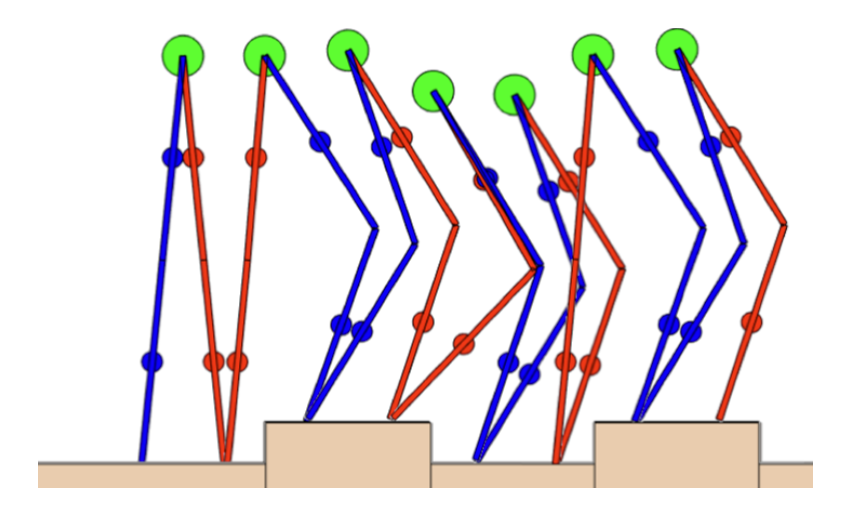
Momentum-Aware Trajectory Optimization and Control for Agile Quadrupedal Locomotion
Ziyi Zhou* , Bruce Wingo* , Nathan Boyd, and 2 more authors
IEEE Robotics and Automation Letters (RA-L) , 2022
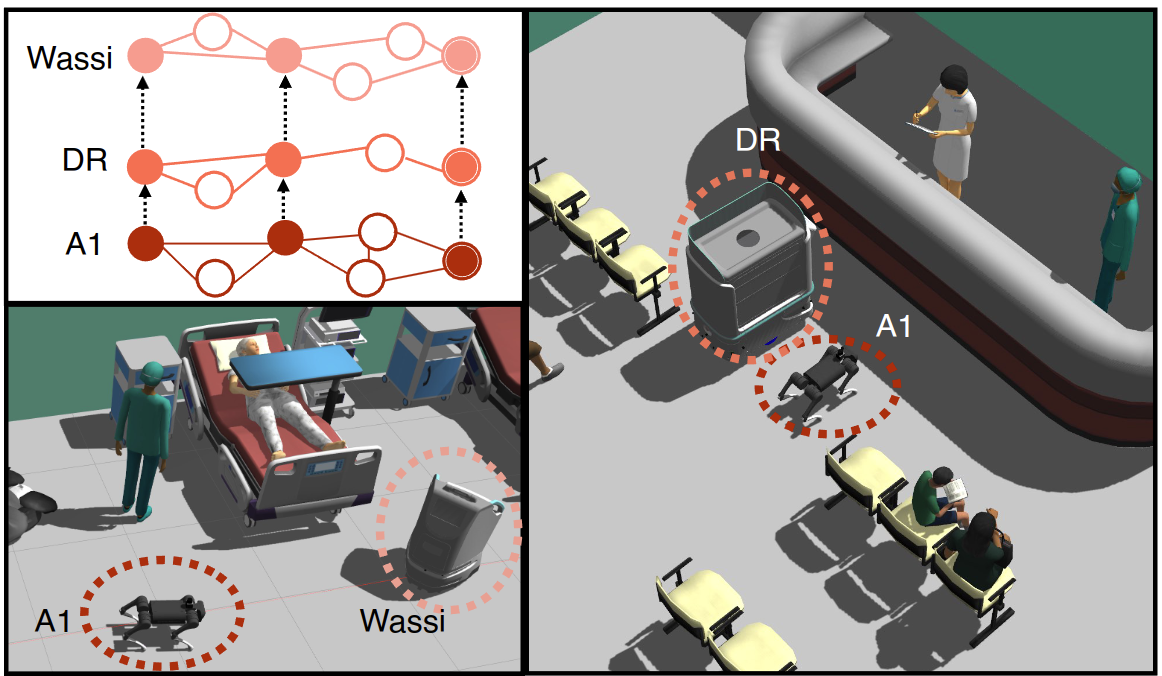
Reactive Task Allocation and Planning for Quadrupedal and Wheeled Robot Teaming
Ziyi Zhou , Dong Jae Lee, Yuki Yoshinaga, and 2 more authors
In IEEE International Conference on Automation Science and Engineering (CASE) , 2022
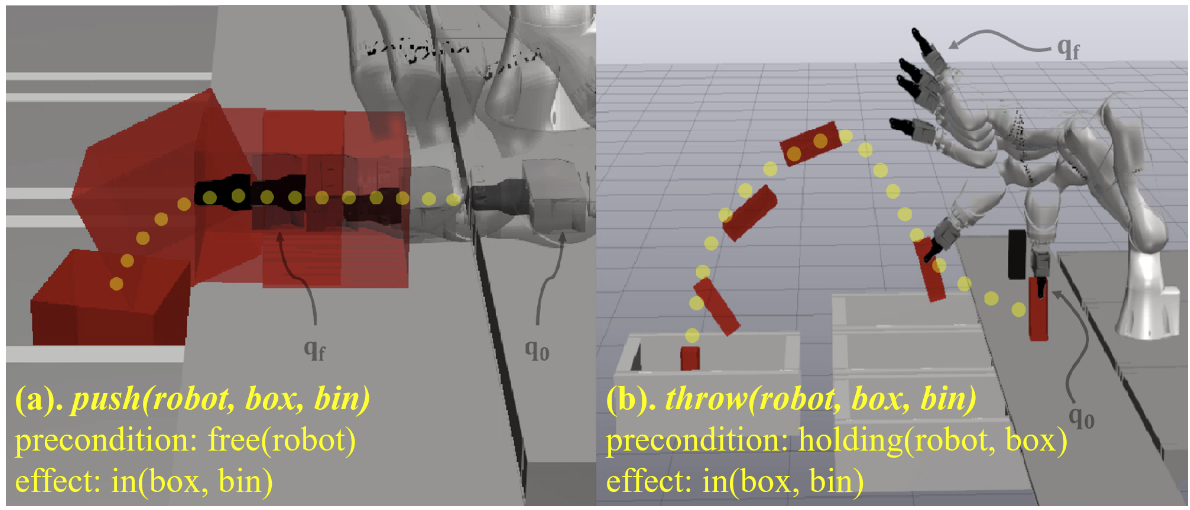
SyDeBO: Symbolic-Decision-Embedded Bilevel Optimization for Long-Horizon Manipulation in Dynamic Environments
Zhigen Zhao* , Ziyi Zhou* , Michael Park, and 1 more author
IEEE Access , 2021
Accelerated ADMM based Trajectory Optimization for Legged Locomotion with Coupled Rigid Body Dynamics
Ziyi Zhou and Ye Zhao
In American Control Conference (ACC) , 2020

 Simultaneous Collision Detection and Force Estimation for Dynamic Quadrupedal LocomotionIn IEEE International Conference on Robotics and Automation (ICRA), 2025
Simultaneous Collision Detection and Force Estimation for Dynamic Quadrupedal LocomotionIn IEEE International Conference on Robotics and Automation (ICRA), 2025